


The Importance of Map Projections
If you imagine peeling an orange and attempting to lay the orange peel flat on a table, you can see that it cannot lay flat without breaking and tearing. The same is true of the earth’s surface because it can’t transform from a sphere to a plane. Thus, it’s impossible to make a completely accurate representation of the earth’s surface on a flat map. A map projection is a solution to this problem. It is a two-dimensional representation of the coordinate locations from the earth’s curved surface. Map projections are necessary in order to create maps. One way to picture the creation of a map projection is that it is formed as if someone is shining a light through the projection source (i.e. a globe) and the image that is projected on the flat surface is the map projection. The flat surface that the image is projected onto is called a developable surface. This surface is then “unrolled” in order to create flat map. There are many types of map projections, but the most useful map projections for GIS are based on developable surfaces. Some examples of the most commonly used developable surfaces are cones, cylinders, and planes. Names of map projections correspond to these developable surfaces, for instance, a map projection based on a cone developable surface is called conic. Instead of using a light to create a projection, cartographers use mathematical formulas to create accurate map projections.
Map projections inevitably become distorted because they attempt to take a curved surface and make it into a flat surface. For instance, one part of a map can be squished into a smaller area while the other part of a map is expanded. Therefore, if you were to measure the distance between two points on a map distorted in this fashion the distance may be smaller or greater than the actual distance. One way to measure the amount of this distortion is by using the great circle distance. The great circle distance is the distance between two points on the earth’s surface measured along the curved surface of the earth. This is then compared to the grid distance, which is the distance between two points measured along the projected surface. The difference between the great circle distance and the grid distance represents the distortion of the distance caused by the map projection. Factors that influence the distortion of the map projection include: the location of the projection source, the shape of the surface onto which we are projecting, and the location of the projection surface in relation to the globe. However, the significance of map projections is that they aim to reduce this distortion to the extent that this is possible. Map projection aim to preserve, shape (conformality), direction, distance (equidistant), and area (equivalence) without distortion. A map projection that attempts to maintain shape and direction is called a conformal map projection. Map projections that preserve area are called equivalent, or equal area, projections. Map projection that preserve distance over a short area but do not preserve area or shape are called compromise or equidistant projections. Finally, map projections in which all properties are distorted, but the map looks nice, are called perspective projections.
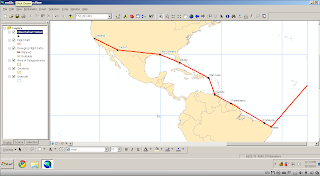
The map projections I used to represent conformal map projections were the Mercator and Gall Stereographic map projections. The Mercator map projection is famous for distoring the size and shape of large objects near the poles. Thus, Greenland appears just as large as Africa, even though Africa is 14 times the size of Greenland. Similarly, the Gall Stereographic conformal map projection that I used also has an exaggerated scale closer to the poles, but to a lesser extent than the Mercator projection. The stereographic projection which is the conformal azimuthal projection, stretches the northern and southern parts of the map horizontally. The Mercator projection expands the distance between Baghdad, Iraq, and Washington,D.C. in comparison to the Gall Streographic projection. The Gall stereographic projection compresses the distance between these cities. The equidistant world map projections I used were the sinusoidal projection and the plate carree projection. The sinusoidal projection is a pseudocylindrical map projection that distorts the distance on the map between meridians such that the distances are smaller, however it preserves distances along parallels. The Plate carree equirectangular projection is centered at the equator and all parallels are equally spaced, as are all meridians. Since the sinusoidal projection compresses the distances between the meridians, the distance between Baghdad, Iraq, and Washington, D.C., appears smaller for the sinusoidal projection in comparison to the plate carree projection. The plate carree projection has equally spaced meridians and thus the distance between the selected cities is expanded. Finally, I used the mollweide and bonne map projections as the equal area map projections. The Mollweide projection is a pseudocylindrical map projection that compresses the parallels near the poles, but the other meridians are equally spaced closer to the equator. The Bonne projection is a pseudoconical equal area map projection in which the scale is only true along the parallels of latitude. From the map we can see that the distance between Washington, D.C. to Baghdad, Iraq, is more compressed on the Bonne projection. Since the Mollweide projection is more equally spaced closer to the equator the true distance between the selected cities is more accurately represented by the Mollweide projection.
Coordinate Systems and Projection Worksheet1. What is an ellipsoid? How does an ellipsoid differ from a sphere?
It is the best fit for a particular location that approximates the surface of the earth. An ellipsoid is a mathematical surface based off of a semi-major and semi-minor axis. There are many ellipsoids approximating the earth’s surface that vary in shape because of geoidal variation in the earth’s surface. An ellipsoid is different from a sphere because an ellipsoid is a sphere that is flattened at the poles.
2. What is the imaginary network of intersecting latitude and longitude lines on the earth's surface called?
Graticule
3. How does the magnetic north differ from the geographic North Pole?
Magnetic north is where a compass points to and geographic North Pole is located at one of the poles of the earth’s axis of rotation. The difference between these north points is called magnetic declination.
4. Why are datums important? Briefly describe how datums are developed.
Datums are important because they provide a frame of reference for the ellipsoid models. Datums consist of two components, a specified ellipsoid and a set of surveyed coordinate locations specifying positions on the earth’s surface. To develop a datum one must painstakingly survey an area using the best methods and equipment. Datum points were first determined using celestial measurements. In more recent years, datum points are now determine by sophisticated electronic and satellite-based surveying systems.
5. What is a map projection?
A map projection is a 2-dimensional representation of the coordinate locations from the earth’s curved surface. Projections attempt to preserve, shape, direction, distance, and area without distortion.
6. What is a developable surface?
The flat surface that the image is projected onto is called a developable surface. This surface is then “unrolled” in order to create flat map. There are many types of map projections, but the most useful map projections for GIS are based on developable surfaces. Some examples of the most commonly used developable surfaces are cones, cylinders, and planes. Names of map projections correspond to these developable surfaces, for instance, a map projection based on a cone developable surface is called conic.
7. Which lines on the graticule run north-south, converge at the poles, and mark angular distance east and west of the prime meridian?
a. Lines of longitude
8. Which of the following ellipsoids is now regarded as the best model of the earth for the region of North America?
a. Clarke 1866
9. Which well known coordinate system would be appropriate to use for developing and analyzing spatial data when mapping counties or larger areas? Why?
State plane coordinate system projection. The state planes system limits projection errors by dividing states into zones. The zones are specified such that any projection distortions are kept below 1 in 10,000. This system reduces distortion that increases over larer distances.
10. What is a great circle distance?
The great circle distance is the distance between two points on the earth’s surface measured along the curved surface of the earth. This is then compared to the grid distance, which is the distance between two points measured along the projected surface. The difference between the great circle distance and the grid distance represents the distortion of the distance caused by the map projection.





{kind=link}